Frigate & Google Coral and Proxmox VM
lsusbroot@orange:/etc/pve/lxc# lsusb
Bus 008 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 007 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 006 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 005 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
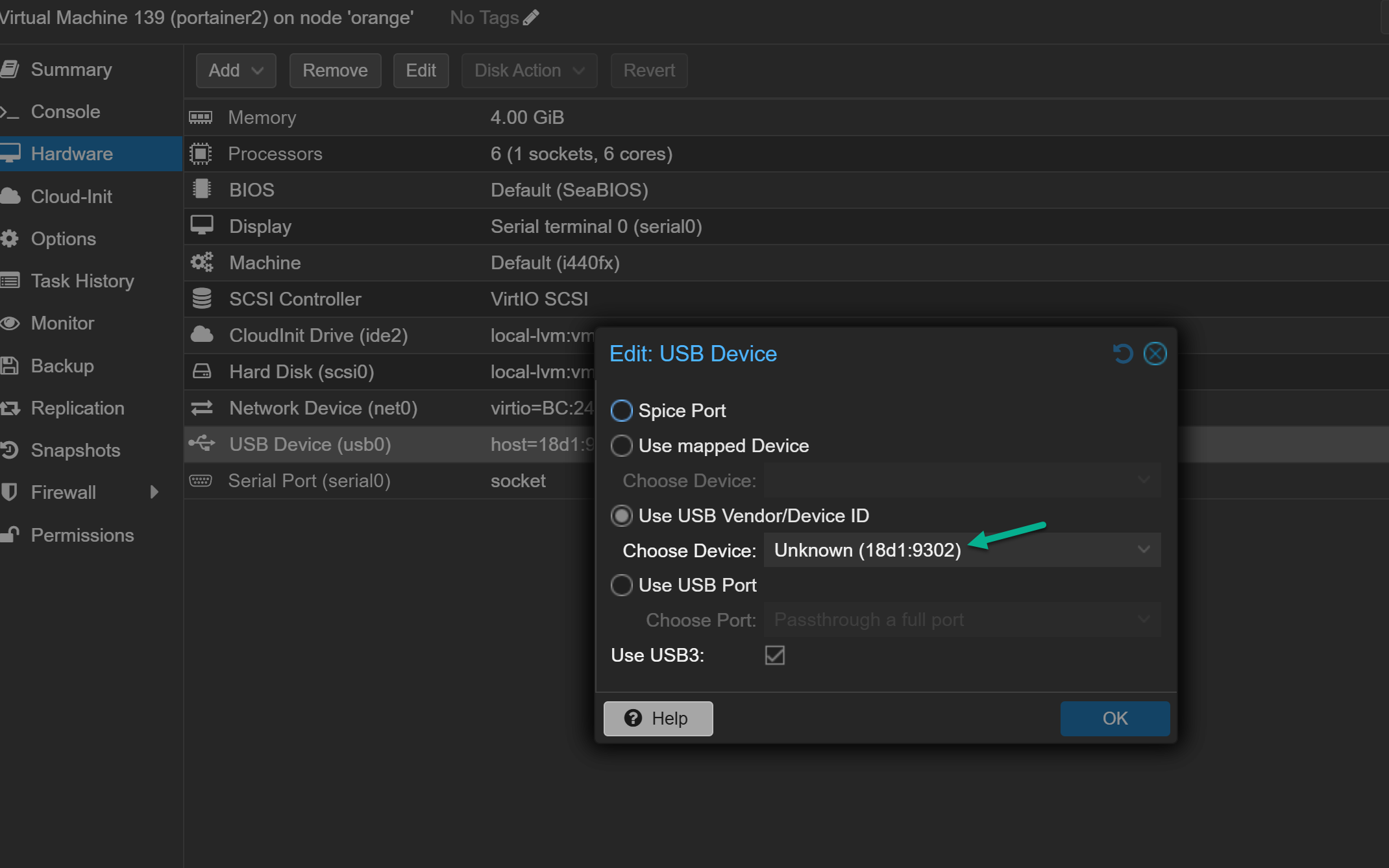
Bus 002 Device 003: ID 18d1:9302 Google Inc.
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 001 Device 002: ID 8087:0029 Intel Corp. AX200 Bluetooth
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Setup Ubuntu and Add USB device:
Restart VM
run lsusb to see if the vm has the USB

Install Docker and Portainer
Add this Docker Compose to install frigate
version: "3.9"
services:
frigate:
container_name: frigate
privileged: true # this may not be necessary for all setups
restart: unless-stopped
stop_grace_period: 30s # allow enough time to shut down the various services
image: ghcr.io/blakeblackshear/frigate:stable
shm_size: "512mb" # update for your cameras based on calculation above
devices:
- /dev/bus/usb:/dev/bus/usb # Passes the USB Coral, needs to be modified for other versions
- /dev/apex_0:/dev/apex_0 # Passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
#- /dev/video11:/dev/video11 # For Raspberry Pi 4B
#- /dev/dri/renderD128:/dev/dri/renderD128 # For intel hwaccel, needs to be updated for your hardware
volumes:
- /etc/localtime:/etc/localtime:ro
- /mnt/portainer2/frigate/config:/config
- /mnt/portainer2/frigate/storage:/media/frigate
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
target: /tmp/cache
tmpfs:
size: 1000000000
ports:
- "8971:8971"
- "5000:5000" # Internal unauthenticated access. Expose carefully.
- "8554:8554" # RTSP feeds
- "8555:8555/tcp" # WebRTC over tcp
- "8555:8555/udp" # WebRTC over udp
environment:
FRIGATE_RTSP_PASSWORD: "strong@pwd"
go to path VM IP:5000 to view the Frigate UI Configuration Editor

Twist your config like mine:
make sure to change username , password and ip address. Below is the 3 tapo c110 configuration url address
mqtt:
enabled: false
cameras:
tapo_username001: # <------ Name the camera
enabled: true
ffmpeg:
inputs:
- path: rtsp://tapo_username001:yourpassw@192.168.1.xxx:554/stream1 # <----- The stream you want to use for detection
roles:
- detect
- record
detect:
enabled: true # <---- disable detection until you have a working camera feed
width: 2304
height: 1296
fps: 5
motion:
threshold: 30
contour_area: 28
improve_contrast: true
record:
enabled: true
retain:
days: 30
mode: motion
snapshots:
enabled: true
timestamp: true
bounding_box: true
retain:
default: 30
tapo_username002: # <------ Name the camera
enabled: true
ffmpeg:
inputs:
- path: rtsp://tapo_username002:yourpassw@192.168.1.xxx:554/stream1 # <----- The stream you want to use for detection
roles:
- detect
- record
detect:
enabled: true # <---- disable detection until you have a working camera feed
width: 2304
height: 1296
fps: 5
motion:
threshold: 30
contour_area: 28
improve_contrast: true
record:
enabled: true
retain:
days: 30
mode: motion
snapshots:
enabled: true
timestamp: true
bounding_box: true
retain:
default: 30
tapo_username003: # <------ Name the camera
enabled: true
ffmpeg:
inputs:
- path: rtsp://tapo_username003:yourpassw@192.168.1.xxx:554/stream1 # <----- The stream you want to use for detection
roles:
- detect
- record
detect:
enabled: true # <---- disable detection until you have a working camera feed
width: 2304
height: 1296
fps: 5
motion:
threshold: 30
contour_area: 28
improve_contrast: true
record:
enabled: true
retain:
days: 30
mode: motion
snapshots:
enabled: true
timestamp: true
bounding_box: true
retain:
default: 30
record:
enabled: true
retain:
days: 30
mode: active_objects
alerts:
retain:
days: 30
mode: motion
detections:
retain:
days: 30
mode: motion
detectors:
coral:
type: edgetpu
device: usb
objects:
track:
- person
- face
- printer
- toy
- filament
- print_bed
- extruder
- tool
- wrench
- screw
- spaghetti
- failed_print
version: 0.15-1
camera_groups:
SonA1:
order: 1
icon: LuFingerprint
cameras:
- tapo_username001
- tapo_username002
- tapo_username003
Click save and restart button
Tips:
Make sure to disable detection on your tapo settings, disable the local recording ( we don't need to use sd card for storage )
Go to the UI > Settings > Motion Tuner to update the Threshold and Contour Area to match your needs.
If you have google coral, it should have red label around the images.

Well done.